Contents
function out = goodwin()
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% % This code simulates the Goodwin model as specified in Grasselli and Costa Lima (2012). % % authors: B. Costa Lima and M. Grasselli %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% close all clc warning off
Parameters attribution
Equations (24) and (26)
nu = 3; % capital-to-output ratio alpha = 0.025; % productivity growth rate beta = 0.02; % population growth rate delta = 0.01; % depreciation rate phi0 = 0.04/(1-0.04^2); %Phillips curve parameter, Phi(0.96)=0 phi1 = 0.04^3/(1-0.04^2); %Phillips curve parameter, Phi(0)=-0.04
Other definitions
TOL = 1E-7; options = odeset('RelTol', TOL); txt_format = '%3.3g';
Functions Definition
fun_Phi = @(x) phi1./(1-x).^2- phi0; % Phillips curve, equation (25) fun_Phi_prime = @(x) 2*phi1./(1-x).^3; % derivative of Phillips curve fun_Phi_inv = @(x) 1 - (phi1/(x+phi0)).^(1/2); % inverse of Phillips curve
Numerical values of interest
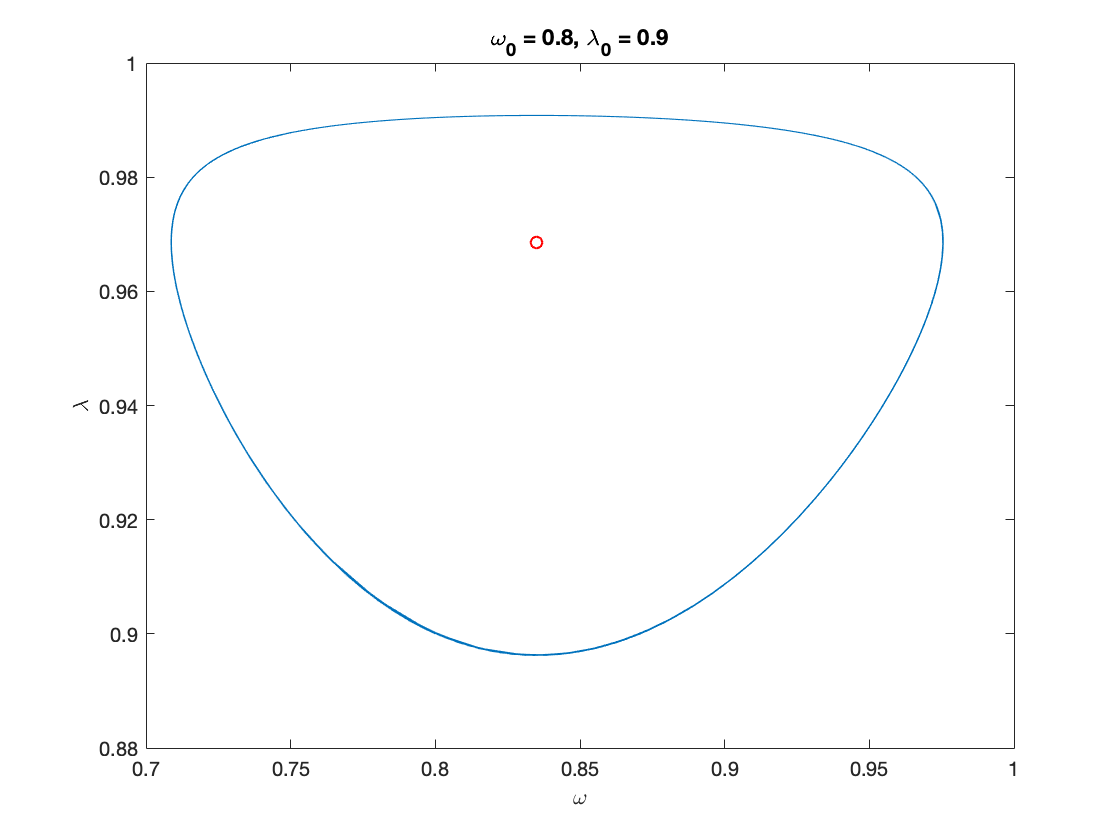
omega_bar = 1-nu*(alpha+beta+delta) % equilibrium wage share, equation (27) lambda_bar = fun_Phi_inv(alpha) % equilibrium employment rate, equation (27)
omega_bar =
0.8350
lambda_bar =
0.9686
Sample paths of the Goodwin model
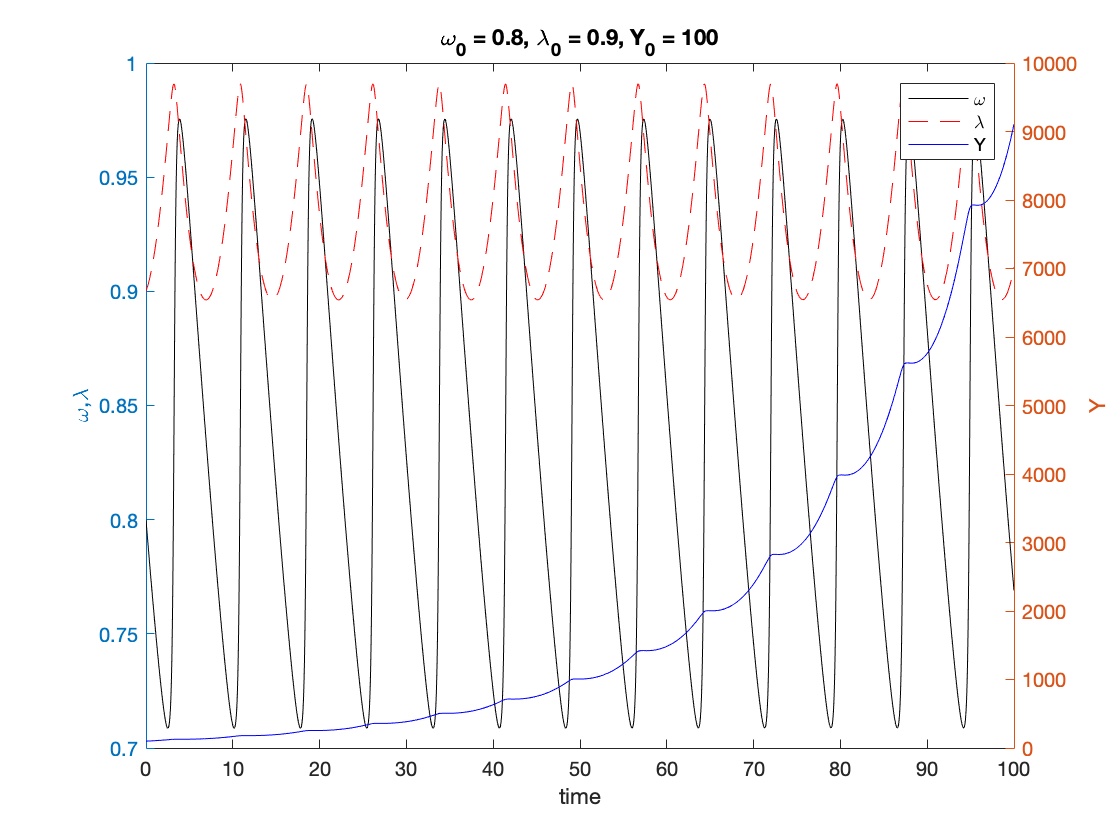
omega0 = 0.80; % initial wage share lambda0 = 0.90; % initial employment rate Y0 = 100; % initial GDP T = 100; % time in years [tG,yG] = ode15s(@(t,y) goodwin(y), [0 T], [omega0, lambda0], options); Y_output = Y0*yG(:,2)/lambda0.*exp((alpha+beta)*tG); % Y(t)=a(t)*L(t), equation (5) % Figure 1 figure(1) plot(yG(:,1), yG(:,2)), hold on; plot(omega_bar, lambda_bar, 'ro') xlabel('\omega') ylabel('\lambda') title(['\omega_0 = ', num2str(omega0, txt_format), ... ', \lambda_0 = ', num2str(lambda0, txt_format)]) print('goodwin_phase','-depsc') % Figure 2 figure(2) yyaxis left plot(tG, yG(:,1), 'k', tG, yG(:,2), 'r') ylabel('\omega,\lambda') yyaxis right plot(tG,Y_output, 'b') ylabel('Y') xlabel('time') title(['\omega_0 = ', num2str(omega0,txt_format), ... ', \lambda_0 = ', num2str(lambda0, txt_format), ... ', Y_0 = ', num2str(Y0, txt_format)]) legend('\omega', '\lambda', 'Y') print('goodwin_time','-depsc')
Auxiliary functions
function f = goodwin(y) f = zeros(2,1); omega = y(1); lambda = y(2); % Equation (12) f(1) = omega*(fun_Phi(lambda)-alpha); % d(omega)/dt f(2) = lambda*((1-omega)/nu-alpha-beta-delta); % d(lambda)/dt end
end